如何選擇標(biāo)準(zhǔn)循環(huán)鏈碼
作者:admin 閱讀量:次 發(fā)表時(shí)間:2021-06-09 03:33
如何,選擇,標(biāo)準(zhǔn),循,環(huán)鏈,碼,概述,對于,電子,
1.概述
對于電子皮帶秤的標(biāo)定�,多數(shù)采用實(shí)物標(biāo)定。此種方法需要大量的人力物力配合,但對大流量的皮帶秤現(xiàn)場標(biāo)定比較困難�。我公司為了解決電子皮帶秤的動態(tài)標(biāo)定問題�,開發(fā)了一種能夠模擬實(shí)際物料運(yùn)行工況的循環(huán)鏈碼校驗(yàn)裝置,以便于對電子皮帶秤進(jìn)行校驗(yàn)和使用中檢驗(yàn)�。
2.產(chǎn)品分類
2.1 循環(huán)鏈碼數(shù)量:循環(huán)鏈碼分單鏈、雙鏈����、三鏈和四鏈,分別對應(yīng)不同的輸送帶寬和用戶的個(gè)性化要求����。
2.2 循環(huán)鏈碼重量:覆蓋10—200kg/m 的選擇范圍,滿足0.5—2.2m帶寬的皮帶秤校驗(yàn)�����。
2.3 鏈碼長度: 可適應(yīng)不同托輥數(shù)量和稱量段的皮帶秤架。
3.工作原理
PXL系列電子皮帶秤動態(tài)校驗(yàn)裝置共有四部分組成��,分別為標(biāo)準(zhǔn)循環(huán)鏈碼�����、循環(huán)鏈碼機(jī)架�、升降系統(tǒng)、控制顯示系統(tǒng)�。整套系統(tǒng)進(jìn)行信號采集、計(jì)算���、處理��、控制����、顯示�。控制部分采用可靠的的PLC控制器進(jìn)行控制����,配置的高精度積算儀表能在就地顯示鏈碼校驗(yàn)裝置的狀況�;系統(tǒng)通過采集速度信號計(jì)算并顯示標(biāo)準(zhǔn)鏈碼的瞬時(shí)流量和累積流量�,同時(shí)采集電子皮帶秤的信號進(jìn)行同步顯示����,從而對皮帶秤的示值進(jìn)行校準(zhǔn);系統(tǒng)具有對鏈碼校驗(yàn)裝置進(jìn)行遠(yuǎn)程啟/?���?刂频墓δ堋H绻x配遠(yuǎn)程上位系統(tǒng)�,可完成遠(yuǎn)程操作監(jiān)控和校驗(yàn)的全過程。
4.結(jié)構(gòu)特征
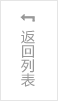
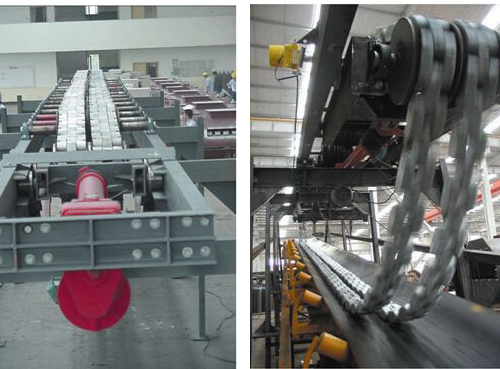
4.1標(biāo)準(zhǔn)循環(huán)鏈碼
每套裝置的每條鏈碼由標(biāo)準(zhǔn)鏈節(jié)組裝構(gòu)成��;每條鏈節(jié)190個(gè)碼塊����;
標(biāo)準(zhǔn)碼塊為方柱形結(jié)構(gòu),相互間用鏈條連接�。
碼塊采用特殊材質(zhì)制作,其表面經(jīng)精加工和特殊工藝處理��。
4.2循環(huán)鏈碼支架
安裝在現(xiàn)場的皮帶機(jī)上方�����,布置在皮帶秤的上方約1.5m的高度內(nèi)。
對鏈碼、轉(zhuǎn)動機(jī)構(gòu)和提升機(jī)構(gòu)進(jìn)行支承。
4.3速度傳感器:采用高精度的光電編碼器�����。
輸出脈沖:100脈沖/轉(zhuǎn)
4.4控制系統(tǒng)
對整套系統(tǒng)進(jìn)行信號采集、計(jì)算�����、處理���、控制和顯示����。
控制部分包括顯示器�、PLC、電器元件和控制箱等部件�。
4.5升降系統(tǒng)
升降系統(tǒng)采用水平漲緊結(jié)構(gòu),用電動推桿驅(qū)動活動齒輪與鏈碼�����;
系統(tǒng)裝置可進(jìn)行自動收放�����;
通過控制柜上的按鈕可自動進(jìn)行鏈碼升降操作
5.技術(shù)參數(shù)
5.1系統(tǒng)參數(shù)
動態(tài)累計(jì)重復(fù)性: ±0.1%
動態(tài)累計(jì)系統(tǒng)誤差: ±0.05%
累計(jì)分度值: 10kg
電源電壓: AC380V 三相五線制
電源頻率: 50Hz
設(shè)備總重: 約3800Kg
適應(yīng)輸送帶寬度: 500~2200mm
適應(yīng)出力范圍: 100~ 10000t/h
整機(jī)消耗功率 約3—15kW
5.2升降系統(tǒng)參數(shù):
型式: 水平漲緊
電動推桿功率: 3.0-~5.5kW
行程: 800-1000mm
5.3顯示儀表
型式: LCD
顯示誤差: 0.01%
顯示分度值: 10Kg